دانشمندان روباتی ساختند که دقیقا مانند یک کبوتر واقعی پر و بال میزند

ما هر روز پرندگانی را در حال پرواز در آسمان میبینیم ولی هرگز تصوری از پیچیدگیهای بال زدن آنها نداریم.
سالها است دانشمندان در حال مطالعه روی فرآیند بال زدن پرندگان و مکانیزمهای مکانیکی این کار به طور طبیعی هستند. ساختن یک روبات پرنده با بالهای ثابت خیلی آسان است ولی پیادهسازی مکانیکی و روباتیکی بال زدن واقعی پرندگان بسیار دشوار نشان میداد.
چون پرندگان در هنگام پرواز؛ بالهای خود را خم و جمع کرده و بعد میچرخانند. همانطور که گفتیم؛ در نظر اول این بال زدن ساده است ولی وقتی بخواهید یک روبات پرنده با این ویژگی بسازید؛ دشواری آن نمود پیدا میکند.

اکنون، تیمی از محققان به دستاورد بزرگی رسیدند و یک پرنده مصنوعی به نام PigeonBot ساختند که گامی بزرگ و بلند برای رسیدن به شبیهسازی پرواز واقعی پرندگان است.

این دانشمندان نتایج تحقیقات و دستاورد خود را در شماره جدید ژورنال Science Robotics منتشر کردند. آنها برای ساختن یک پرنده با بالهای طبیعی، از پرهای واقعی کبوتر استفاده کردند ولی دو نقطه قابل خم در بال در نظر میگیرند تا شبیه بال پرندگان باشد.
رمزگشایی از حرکات بال پرندگان
این کبوتر روبات میتواند دقیقا بال زدن یک کبوتر واقعی را شبیهسازی و تقلید کند. البته، دانشمندان هنوز راه زیادی تا پرواز دادن این پرنده روبات دارند اما ساخت آن باعث میشود دقیقتر مکانیزم کار بال پرندگان را مطالعه کرده و به پرسشهای بعدی خود مانند چگونه در هوا معلق ماندن با باز کردن بالها برسند.

این کبوتر روباتیک، نزدیکترین طرح به پرندههای واقعی است. دانشمندان در مقالات خود کاملا توضیح دادند چرا این طرح بسیار خوب عمل کرده و میتواند رازهای دیگری از نحوه پرواز پرندگان را آشکار کند.
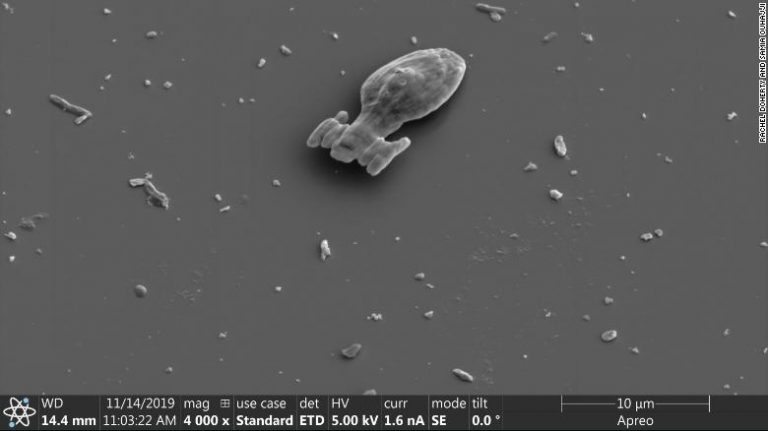
مثلا، در این مقالات توضیح داده شده است که بالهای پرندگان دارای پرهایی است و این پرها هم از قلابهایی تشکیل شدند که باعث میشود به پرهای کناری خود بچسبند. این قلابهای به اندازهای کوچک و اندک هستند که با چشم غیر مسلح قابل دیدن نخواهند بود و فقط با استفاده از میکروسکوپها مشاهده میشوند.
مطالب مرتبط